Throttle
Before you start, you should check what is:
It is recomended to disable the motor before you start with the throttle tuning. Otherwise, the motor can start to spin during the throttle tuning.
To do that, execute stop command. This will disable the motor until the next power cycle.
Acceleration
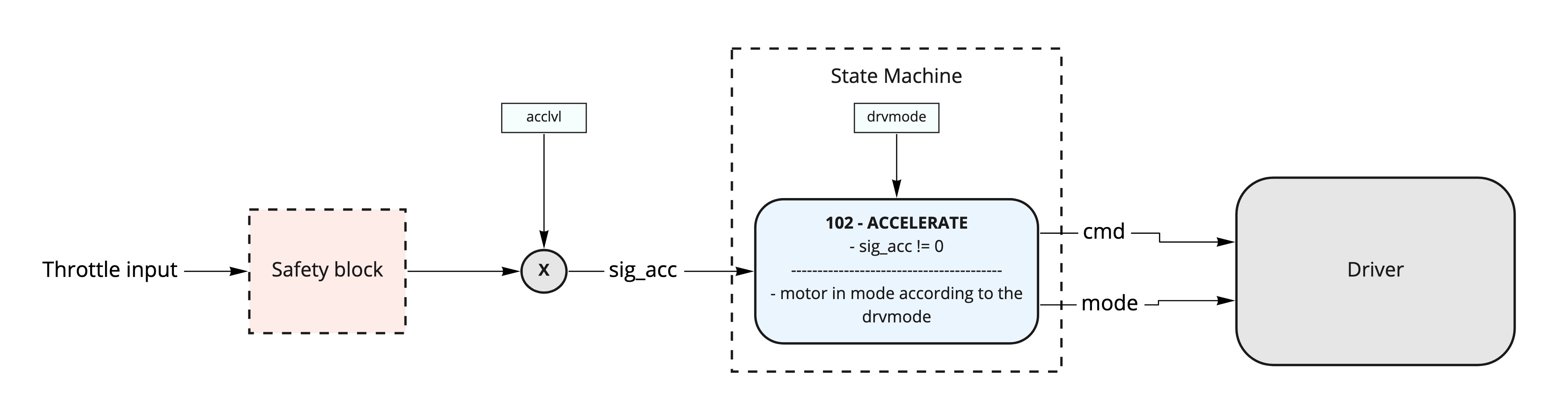
Generic throttle input is fed through a safety block. This can disable the acceleration command if there is a safety hazard (the device is disarmed). Then the acceleration signal is multiplied by the value of parameter acclvl (defines the maximal value of acceleration command). Multiplied signal (sig_acc) is going to the state machine. sig_acc is directly transferred as cmd for driver, and driver motor mode is defined by parameter drvmode (user can select what motor mode will be used for acceleration)
The system offers advanced features in reference to acceleration, such as throttle/brake fusion, electronic clutch, or selectable motor mode. Check other chapters for more information.
Before you continue with advanced throttle setup, please test the LYNX with only one throttle signal. This will ensure, that the LYNX is working properly and you are not fighting with two problems at once. More about this - Basic throttle settings
States
sig_acc [-1 - 1]
This is the acceleration (throttle) signal. It is a normalized value from 0 to 1. It is used as a command for the driver.
Parameters
acclvl [0-1]
It is parameter in each map. Using this parameter, you can scale the throttle signal. More about user maps..
Actual used value can be found in state /acc/acclvl.