Rest variables
rest = Rotor position ESTimator
Next variables are located in the folder /driver/rest.
Wrong settings in this folder may cause unexpected motor spining, even with in the stop command issued and/or any other freewheeling mode! Proceed with caution.
State varibles
hall
Position of hall sensors. This variable is used only in the hall sensor mode.
| Value | Description |
|---|---|
| 0 | All hall sensors are off - Error value |
| 7 | All hall sensors are on - Error value |
| 1-6 | Hall sensor position |
Hall startup parameters
All the sensor parametres are automatically identified with the identrun procedure, no need to set it manually.
hinv [-]
UVW hall sensor polarity inversion.
A bitwise parameter that allows the user to flip polarity of the selected hall input. The inversion is useful e.g. with 60° hall sensor.
| bit | description |
|---|---|
| 0 | U hall inversion |
| 1 | V hall inversion |
| 2 | W hall inversion |
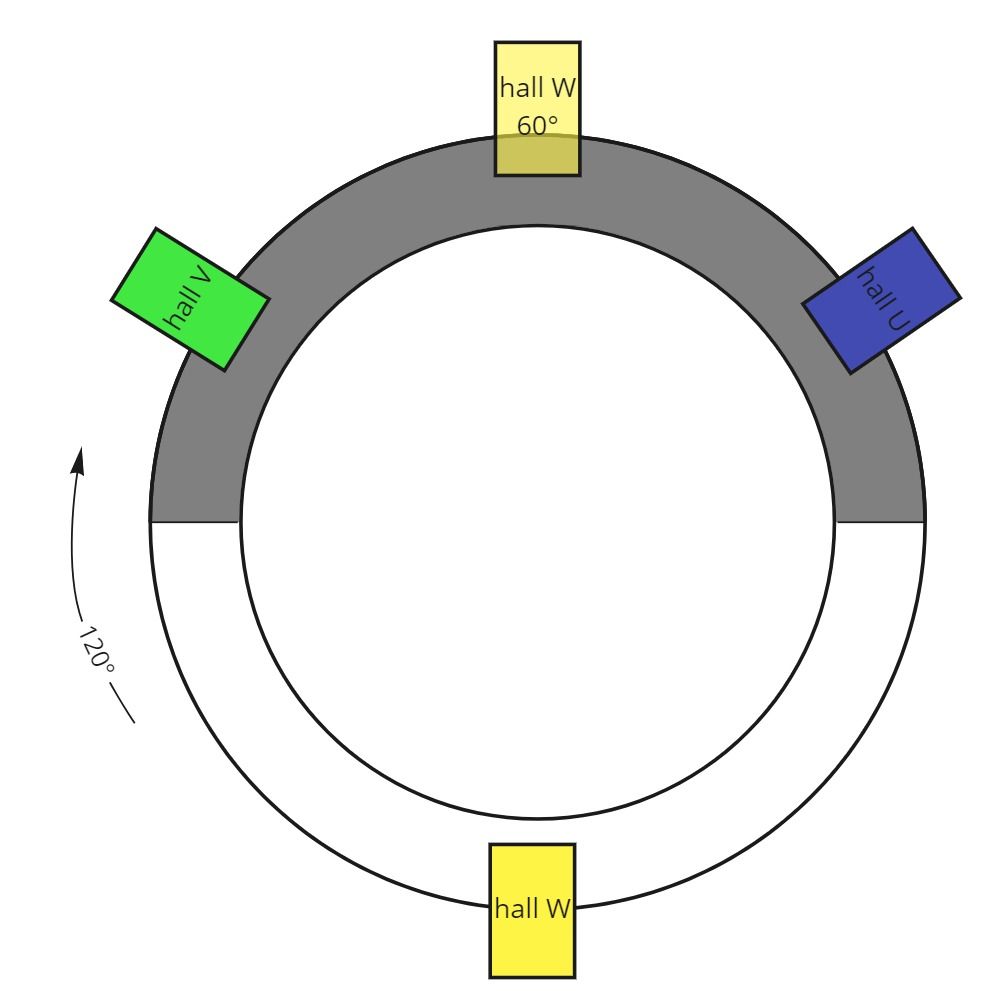
This picture depicits the schematic of two possible hall sensor configurations: 60° and 120°. With 60° configuration, the hall_W must be inverted:
Colors of the hall sensors are usually used on msens wires.
This parameter is not automatically detected during identification procedure and must be set manually. For more standard 120°, use the default, zero value.
hvar [-]
Hall sensor connection variant. This parameter maps the hall sensor inputs to the motor coils.
Sensoreless startup parameters
maxp [pwm cycles]
PWM cycle = 50us
If a single commutation step takes longer than the time specified with this parameter, the BLDC will switch to "startup" mode.
smaxp [pwm cycles]
Sensoreles startup maximal commutation period. During sensoreless startup, if a single commutation step takes longer than the time specified with this parameter, one commutation step is forced (1/6 of electrical revolution).
The forced commutation time value is selected randomly, in range from 0 to smaxp to minimize the lock-up in a resonant peak. The default value yields to zero, which instruct the driver to use the value defined by maxp.
thr [LSB]
The threshold for detecting a zero-cross event during sensoreless mode.
advancing [deg]
If parameter /driver/aac is non-zero, this parameter is ignored.
This parameter will force advancing angle to to the algorithm.