Scooter
This is an example of the complete wiring and configuration of a scooter using a siliXcon SC controller with LYNX firmware. The scooter is an Akumoto 600.
The original controller was replaced with the siliXcon SC controller and the wiring was modified. Original power cables were replaced with SIF cables with bigger cross-sections. A DIY display was added.

Wiring
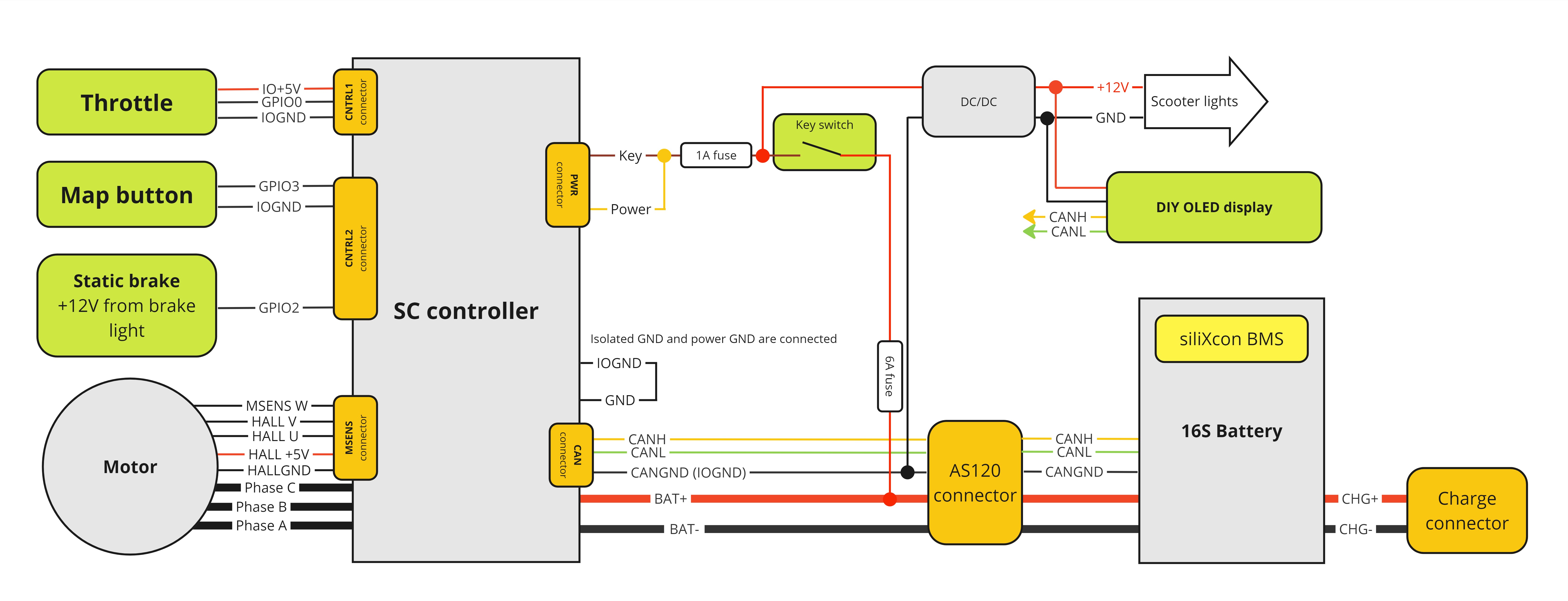
The siliXcon SC controller is without internal FUSE (KEY and BAT+ are not connected inside the controller) - this is not standard powering variant.
Connecting GND and IOGND can be also done inside the controller.
Display
The scooter uses a DIY display. The display reads CAN messages and shows:
- current map
- time (from display RTC, time is synchronized from internet over Wifi)
- air temperature (from Dallas temperature sensor)
- Battery SOC
- If Home Assistant is connected, the ESP sends some stats there for logging

The display is connected to the controller via the CAN bus. The display is based on ESP32 and SH1106 128x64 OLED display. The display is powered from +12V. The firmware uses esphome. Here is the code for display: scooter.yaml
This is a DIY display solution. SiliXcon doesn't provide any support for this display or will not manufacture it. If you want to make this display, you need to do it by yourself. Use esphome documentation for more information.
Configuration
Not mentioned parameters are default.
Driver settings
Basic driver settings.
- Motor polepairs are needed to get the correct speed reading.
- Enable field weakening by increasing
fwcparameter value. This is needed for reaching higher speeds from the scooter. irefis set experimentally. After riding in summer in hot weather, motor temperature was observed. Theirefwas slowly increased until the motor temperature was acceptable.ipeakneeds to be higher thaniref, but lower than BMS short circuit current.- the
ipeakis negative to switch motor direction
- the
irefrsets maximum braking current. The value is negative.
"/driver/motor/pp" : "30" # '[pairs] pole pair count'
"/driver/dac/fwc" : "0.300000" # '[.iref] flux weakening current limit <0:disable>'
"/driver/iref" : "180.0" # '[A] reference phase current'
"/driver/irefr" : "-40.0" # '[A] brake phase current <0:disable>'
"/driver/ipeak" : "-250.0" # '[A] peak phase current (negative to switch direction)'
Motor parameters obtained from motor identification.
"/driver/motor/psi" : "0.017268" # '[Wb] PM flux linkage <0:ACIM> <eps:synRM>'
"/driver/motor/Rt" : "0.025072" # '[Ohm] resistance'
"/driver/motor/Ld" : "6.20675e-5" # '[Henry] D inductance'
"/driver/motor/Lq" : "6.55815e-5" # '[Henry] Q inductance'
"/driver/rest/hvar" : "5" # 'UVW hall sensor connection variant'
"/driver/rest/rangle" : "0.504701" # '[rad] sensor angle offset'
Battery limitation. The scooter uses siliXcon BMS and these parameters are overwritten by the BMS. But the default values are fall back.
"/driver/limiter/ibpos" : "130.0" # '[A] battery positive current limit <0:disable>'
"/driver/limiter/ibneg" : "-20.0" # '[A] battery negative current limit <0:disable>'
"/driver/limiter/ubmax" : "67.2000" # '[V] battery maximum voltage limit <0:disable>'
"/driver/limiter/ubmin" : "3.0" # '[V] battery minimum voltage limit <0:disable>'
"/driver/limiter/ubgain" : "0.100000" # 'battery voltage limiter gain'
Speed limitation parameters. It is necessary to tune these parameters. Wrong settings can cause oscillation or slow reaction.
"/driver/limiter/rdec" : "50.0" # '[RPM] speed limiter decrement rate'
"/driver/limiter/rgain" : "50.0" # 'speed limiter gain'
Speed reading
To make speed limitation work, it is necessary to set the speed reading. The speed is calculated from the motor speed.
gearthris in default value 1, because the scooter use hub motor and the gear ratio is 1:1.
"/odothr" : "704.0" # vartype: pr, desc: '[R/km] wheel revolutions per km'
Input setting
GPIO0 - is the throttle input. Always use floating input for analog readings. GPIO1 - is the brake input. The input is direct +12V from the brake light. Use the pull-down to increase input tolerance from 10V to 12V GPIO3 - is map switch input.
Beepvol is set lover to reduce beeping.
"/common/ioconf0" : "0" # '<0:floating> <1:pull-up> <2:pull-down>'
"/common/ioconf1" : "2" # '<0:floating> <1:pull-up> <2:pull-down>'
"/common/ioconf3" : "1" # '<0:floating> <1:pull-up> <2:pull-down>'
"/common/beepvol" : "100" # 'common beep volume'
By default, GPIO0 is used as the throttle. Other inputs must be configured.
The map and cruise share the same input. The map is activated by a short press. The cruise is activated by a long press. Value 19 means it is GDIN1. GDIN is digital representation of GPIO.
"/io/IN_mapswitch" : "19,0" # 'DIN ID'
"/io/IN_cruise" : "19,0" # 'DIN ID'
"/io/IN_sbrake" : "17,0" # 'DIN ID'
Throttle settings
"/acc/csc/ldz" : "0.0" # vartype: pr, desc: 'lower deadzone'
"/acc/asc/min" : "1100" # vartype: pr, desc: '[mV,*] min of range'
"/acc/asc/max" : "4000" # vartype: pr, desc: '[mV,*] max of range'
"/acc/asc/center" : "2000" # vartype: pr, desc: '[mV,*]'
"/acc/asc/absmin" : "200" # vartype: pr, desc: '[mV,*] lowest valid'
"/acc/asc/absmax" : "4800" # vartype: pr, desc: '[mV,*] highest valid'
"/acc/acc_opts/thr_curr_offset" : "0.0" # vartype: pr, desc: 'Used only in voltage mode. 0 -> imult is scaled same as current'
"/acc/acc_opts/VLT_enter_margin" : "0.05" # vartype: pr
"/acc/acc_opts/CUR_enter_margin" : "0.150000" # vartype: pr
"/acc/acc_opts/smooth_lpf" : "0.100000" # vartype: pr, desc: '[lpf] smooth acceleration start, adds lpf to imult, umult <1 : disabled>'
Brake settings
Brake switch (static brake)
Using these parameters are tuned engaging and disengaging of the static brake.
"/brake/rgnslup" : "0.002000" # vartype: pr, desc: 'static brake rise rate'
"/brake/rgnsldn" : "0.030000" # vartype: pr, desc: 'static brake fall rate'
Combrake (combined brake - braking from throttle)
To make combined brake work, you need to set set /acc/asc/center.
Value 19 = 1 + 2 + 16
- 1 - brake doesn't disarm
- 2 - comlvl enable
- 16 - auto-hold
"/drvopts" : "19" # vartype: pr, desc: '|1:brake doesn't disarm| |2:comlvl enable| |4:brake combined mode| |8:brake comb disable reverse| |16:auto-hold| |32:auto-brake|'
Maps settings
In the scooter are used 2 maps. The first map is for speeds up to 46km/h. The second map is for speeds up to 70km/h.
Maximum torque is the same in both maps. Only power and speed are different.
"/maps/mapcnt" : "2" # vartype: pr, desc: 'no of maps'
"/maps/initmap" : "-1" # vartype: pr, desc: 'initial map number <-1 : Restore last map>'
"/maps/kphlimit" : "75.0" # vartype: pr, desc: 'max speed for maps'
"/maps/pwrlimit" : "5000.0" # vartype: pr, desc: 'max pwr for maps'
"/maps/map0/kph" : "75.0" # vartype: pr
"/maps/map0/pwr" : "5000.0" # vartype: pr
"/maps/map1/kph" : "46.0" # vartype: pr
"/maps/map1/pwr" : "3000.0" # vartype: pr
"/maps/map1/trqlvl" : "1.0" # vartype: pr
"/maps/map1/comlvl" : "0.800000" # vartype: pr
"/maps/map1/sbrakelvl" : "1.0" # vartype: pr
"/maps/map2/kph" : "70.0" # vartype: pr
"/maps/map2/pwr" : "5000.0" # vartype: pr
"/maps/map2/trqlvl" : "1.0" # vartype: pr
"/maps/map2/paslvl" : "0.0" # vartype: pr
"/maps/map2/comlvl" : "0.800000" # vartype: pr
"/maps/map2/sbrakelvl" : "1.0" # vartype: pr
Misc
Enable warning beep and auto shutdown.
"/misc/warntim" : "30" # vartype: pr, desc: '[s] time to warning sound'
"/misc/shdntim" : "600" # vartype: pr, desc: '[s] time to shutdown'
BMS
Receiving CAN messages from siliXcon BMS needs to be enabled. The BMS sends SOC. This is used for the battery gauge on display.
"/bms/bmstype" : "1" # vartype: pr, desc: 'Type of BMS: <0:disabled> <1:siliXcon> <10:kortanek> <20:Jikong> <30:akuenergy>'