CAN messages
This part of the documentation is for LYNX-specific messages. If you are interested in other messages, see driver documentation
DBC file
You can download DBC file for the LYNX here.
warning
Always read the documentation here on the website. There are more information than in the DBC file.
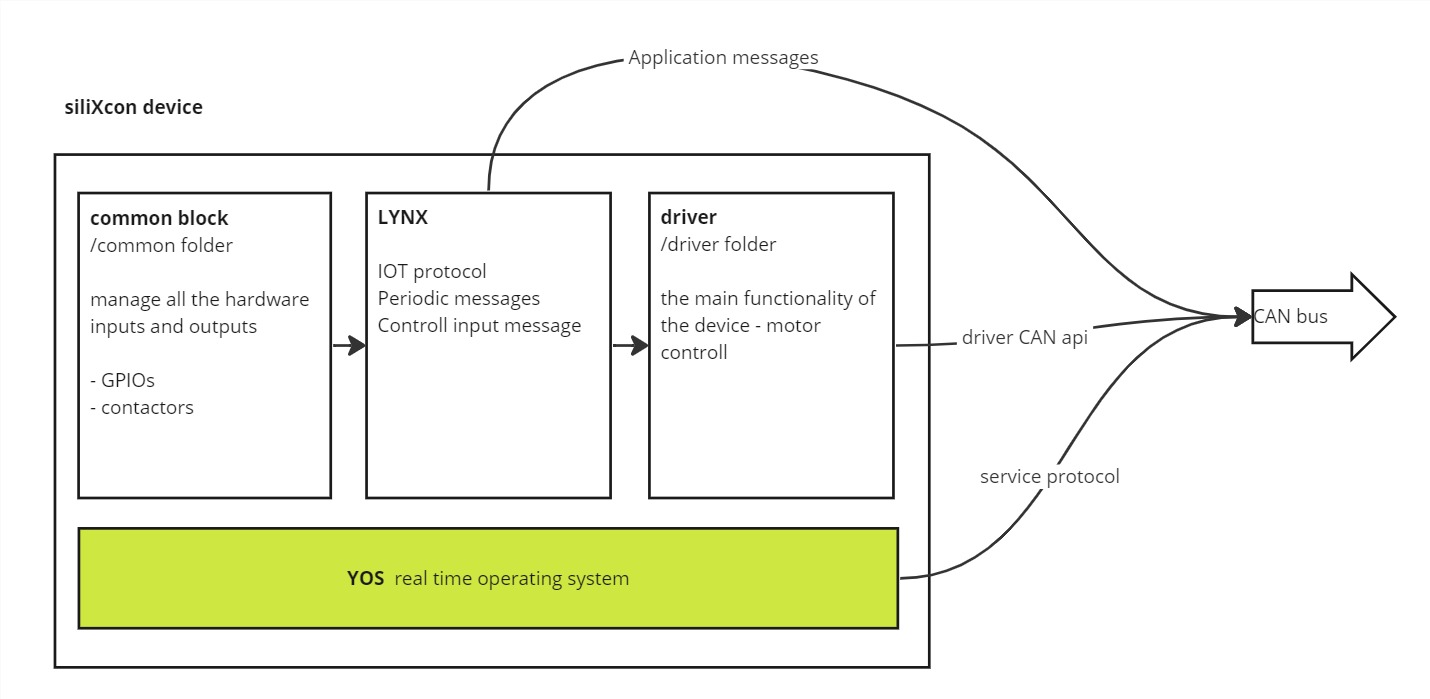
Periodically sent messages
These messages are sent periodically by LYNX application. They are available after controller startup.
info
If the device address is not 0, messages are not sent.
Controll input message
Using these messages, you can send inputs to LYNX over CAN. Like throttle, brake, map switch, etc. This is used usually if you are out of GPIOs.
info
Device with address 0 ignores this message.
IOT protocol
Using these messages, you can read/write some LYNX parameters from/to controller over CAN.