Brake
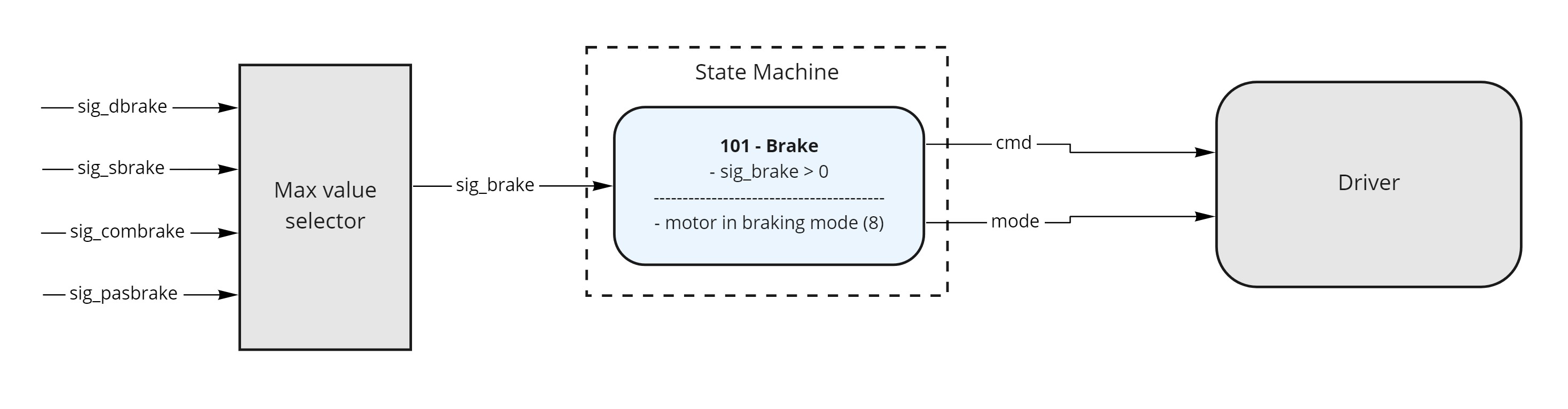
There are four independent sources of braking in Lynx. Each of them can be activated/deactivated and modified by dedicated parameters. The braking input, which has the highest value, is fed to the driver block and used as its cmd (driver mode 8). The signal flow of the braking signal is visible in the picture below. All the braking inputs (and their signal flow) are closely described in the upcoming chapters.
Brake signals
| State variable | Description | Unit |
|---|---|---|
/sig_brake | Final braking, after the max value selector | [0-1] |
/brake/sig_combrake | Indicates current throttle braking level | [0-1] |
/brake/sig_dbrake | Indicates current dynamic brake level | [0-1] |
/brake/sig_pasbrake | Indicates current negative cadence braking level | [0-1] |
/brake/sig_sbrake | Indicates current static brake level | [0-1] |
If you do not see the signals, they are removed from your build due to memory limitation. The functionality is still available, but you cannot monitor the signals. The /sig_brake is always available.
Setting the braking current reference
The braking current reference is defined by driver settings using the parameter /driver/irefr. If the /driver/irefr is 0, the /driver/iref is used as the braking current reference.
More about the driver settings can be found in the Driver settings - References documentation.
Braking current limiters
The maximum braking force may be limited by other settings.
/driver/limiter/ibneg- This is the maximum regenerative current to the battery. The braking is limited if this current is reached./driver/limiter/pneg- This is the maximum regenerative power to the battery. The braking is limited if this power is reached./driver/limiter/eblimit- External limitation from the BMS.
More information about driver limiters can be found in the Driver settings - Limiters documentation.
Disable brake in map
If you have set up brake. The brake always disables the throttle if it's pressed.
You can disable the brake in the map by setting the options parameter in the map folder. With default value, the brake is enabled.
options value | Description |
|---|---|
| 1 | Disable static brake |
| 2 | Disable dynamic brake |
| 3 | Disable static and dynamic brake |
| ... | Check the options documentation for other configuration values |
Note: It is bitwise parameter
Parameter options is located in /maps/mapX, so you can set functionality individually for each map.