Redundant throttle
The system offers a second throttle input to ensure the higher safety of the Ride-by-Wire accelerator.
There are two possible scenarios for using the redundant throttle signal:
- Throttle with dual analog signal
- Throttle with one analog signal and end-stop switch
Both scenarios in case of an error set the sig_acc value to NaN. This will disarm the vehicle. Using the safetyopts parameter you can set if the vehicle recovers from this or not. With the default value, the vehicle stays disarmed to the next power cycle.
Mentioned variables are located in the folder /acc.
Before you continue with redundant throttle setup, please test the LYNX with only one throttle signal. This will ensure, that the LYNX is working properly and you are not fighting with two problems at once.
Parameter
dual_err
- 0:1 - Threshold for valuation of error (dual analog signal)
- -1 - Enables check by throttle end switch
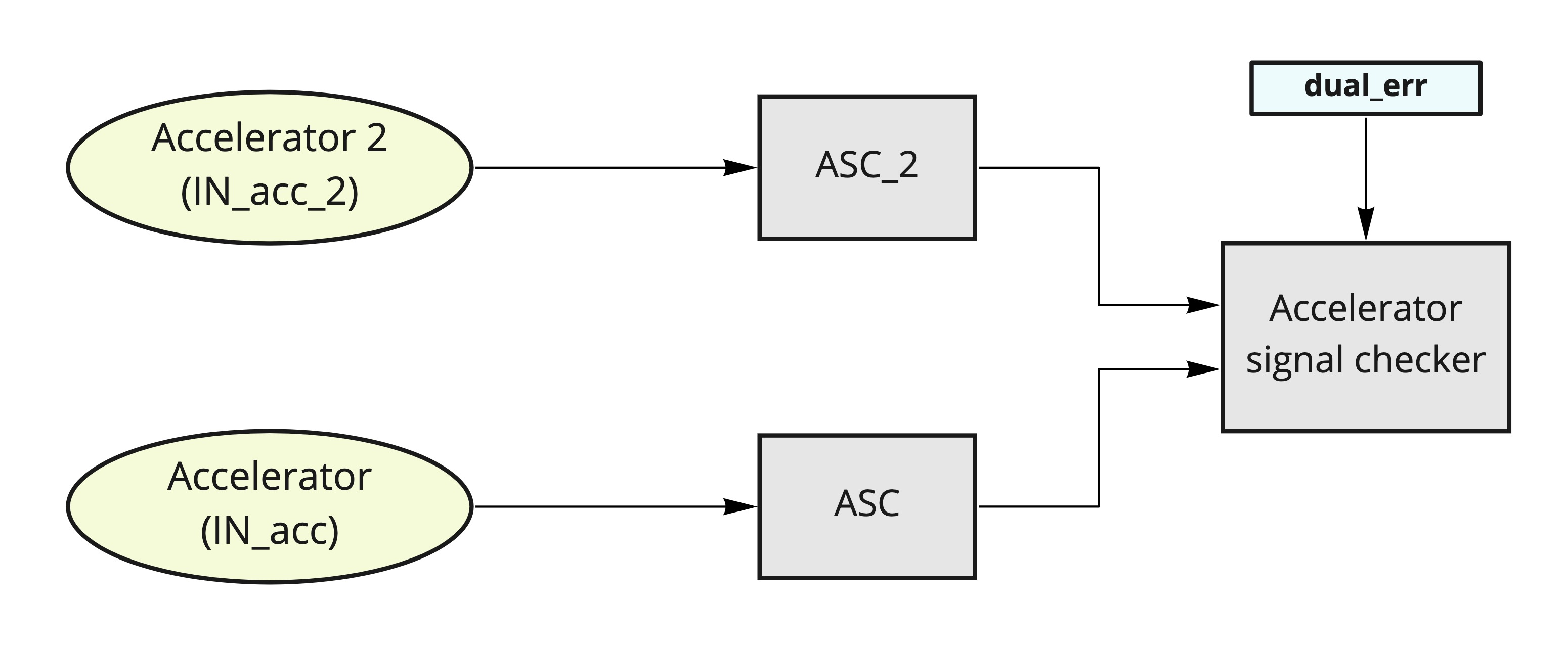
Dual analog signal
This feature compares both throttle signals (after the ASC and ASC_2) and if their difference is above the level set by value in parameter dual_err then the acceleration is disabled. The structure is shown in the picture below
How to configure
- Configure the input signals in the ASC block.
- Plot these variables to the Scope:
/acc/asc/out,/acc/asc_2/outand/acc/acc_err - Tune the ASC values to get the same signals from botch ASCs, ie. the
acc_erris near 0 - Set the
dual_errto a value a little higher than the maximum of theacc_err. If theacc_erris abovedual_err, the acceleration will be disabled.
Throttle with end-stop switch
This feature is used for the throttle with one analog signal and end-stop switch. If the throttle value (after the ASC) is above dual_err and the endstop switch is activated, the device is disarmed.
How to configure
Please see the difference between GPIO ID and GDIN ID.
- Configure the input signals in the ASC block.
- Plot these variables to the Scope:
/acc/asc/outand/acc/acc_err - From the plot, check the
/acc/asc/outvalue at the moment when the end-stop switch is activated. - Set the
dual_errto/acc/asc/outvalue with a negative sign. - Move with the throttle and check if the
acc_erris zero. If not, decrease thedual_errvalue.
Most common input IDs
Check the Input mapping for more information.
| GPIO ID | Input name |
|---|---|
| 8 - default | GPIO0 |
| 9 | GPIO1 |
| 10 | GPIO2 |
| 11 | GPIO3 |
| 12 | GPIO4 |
Also it is recommended to configure the GPIO to the floating input (disable pull-up or pull-down resistor). This can be done by setting the /common/ioconfX parameter to 0. More about ioconf here
| GDIN ID | Input name |
|---|---|
| 16 | GDIN0 |
| 17 | GDIN1 |
| 18 | GDIN2 |
| 19 | GDIN3 |
| 20 | GDIN4 |
| 32 | DIN1 |
| 33 | DIN2 |
| ... | ... |
| 39 | DIN8 |
- For the endstop you can use the GDIN ID or DIN ID.
- For the end-stop switch you will most likely need to enable the pull-up resistor. This can be done by setting the
/common/ioconfXparameter to 1. More about ioconf here