Pedal Assist System
General settings of the device
| Parameter | Description | Range |
|---|---|---|
| pasopts | PAS options (options can be combined) | 1 - Enables reverse pedaling brake (PAS brake) |
| trqgain | Defines torque multiplier (for human_trq calculation) | [-] |
| State variable | Description | Unit |
|---|---|---|
| human_trq | Indicates torque signal for human watts calculation | [-] |
| human_watts | Indicates human watts signal (cadence x human_trq x 10) | [-] |
| paslvl | Indicates value of paslvl multimplier | [-] |
Lynx offers advanced pedal assistant system with cadence and torque input with possibility to activate "human watts" feature to fulfil the most demanding users' requirements.
In default state, only the cadence sensor is used (but cadence is implemented in all the other modes). Digital pulses from its input are normalized in Tachopas block and its output is read as cadence (normalized signal 0-1). Cscpas block is there for optional shaping of the cadence signal. The last block before the state machine is a multiplier. It scales cadence signal by value defined by parameter paslvl (defines amount of PAS support). To the state machine is fed also information about torque. Its input is value 1 in the case where no torque sensor is mapped to the system. But before it reaches the state machine, the torque signal is multiplied by pastrq value (defines torque for PAS suppor). Motor mode 3 (with limit for maximal torque - defined by sig_toruqe) is used for driver. Signal sig_pas defines driver cmd.
This function is activated if in_cadence is mapped to a valid physical input
PAS default configuration:

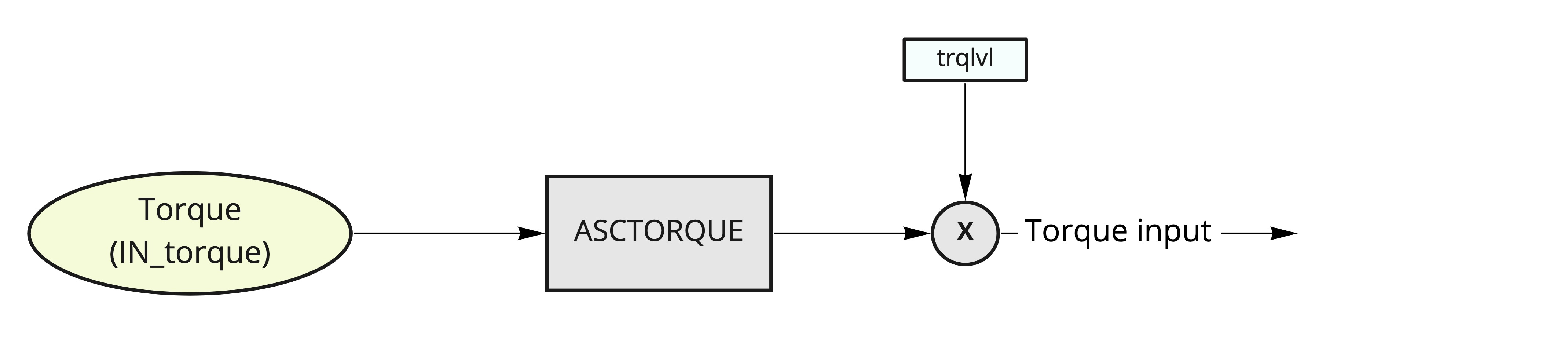
PAS with torque sensor
This is advanced option of PAS where also infromation about force acting on pedals is processed. Raw analogue signal is normalized in asctorque block, then is multiplied by trqlvl value (to reduce global motor torque). Resultant signal is then follows the same path as in the default PAS configuration.
This advanced PAS function is activated if in_torque is mapped to a valid physical input
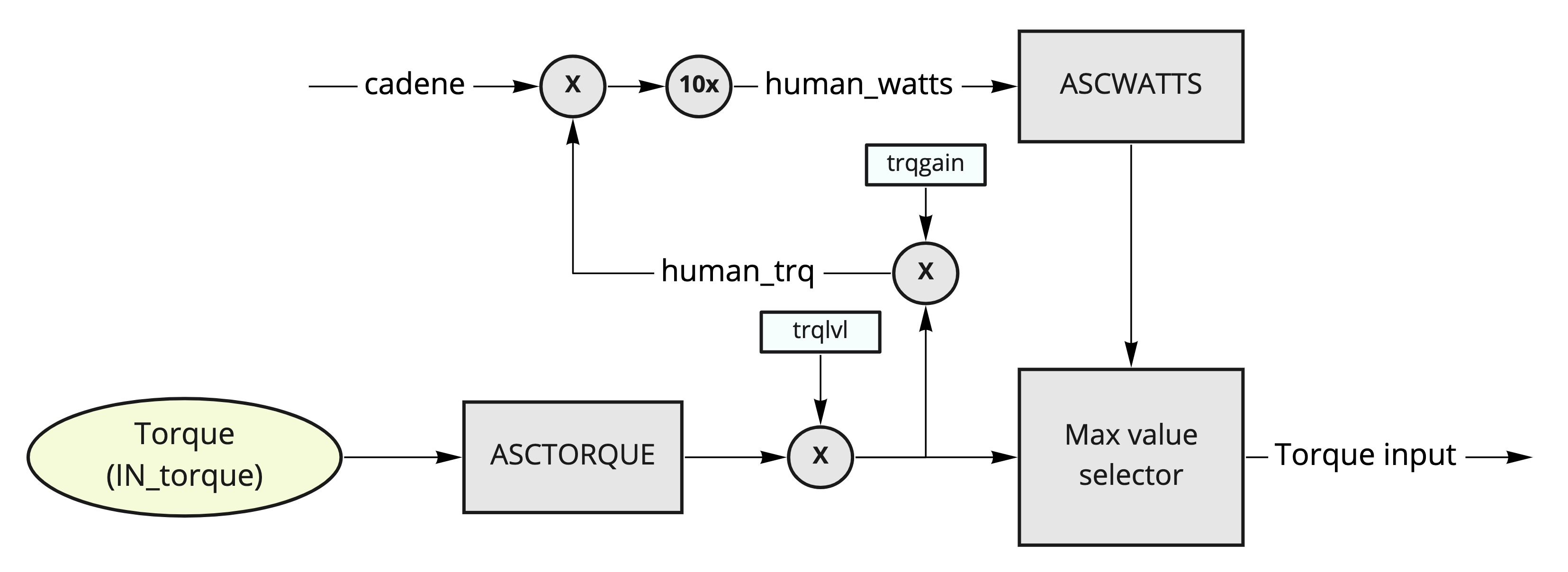
PAS with human watts
The latest addition to the PAS features. It is combining cadence and torque signal to achieve better torque control during fast pedalling.
The analogue torque signal path is the same as in the previous section. The signal after trqlvl multiplier is fed to another multiplier with the factor defined by trqgain (human_trq). Then the output signal is merged with the cadence signal and multiplied by factor of ten. The resultant signal is called human_watts. Its raw value is normalized in ascwatts block.
The final block of this advanced fusion is Max value selector. It send to its ouput the signal with the higher value (direct torque from torque sensor or human watts). The output signal then follow the same path as in the default PAS configuration
This advanced PAS function is activated if in_torque is mapped to a valid physical input and trqgain is not equal to zero