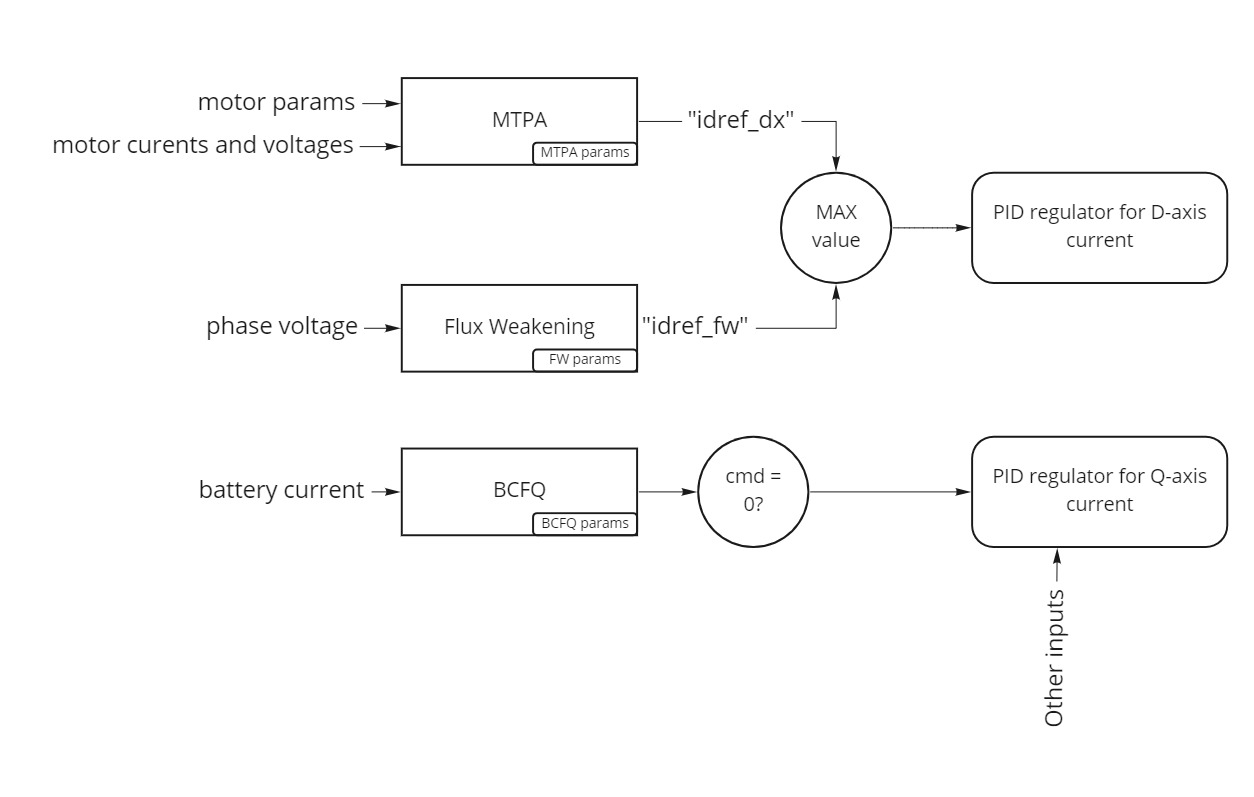
Flux weakening
This subsystem uses d-axis current control to reach adaptive flux weakening (extending the motor speed range under the same DC-side voltage).
- Next variables are located in the folder
/driver/dac. - This page is related to the VECTOR algorithm only.
Parameters
fwc [.iref]
The flux weakening current limit <0:disable>.
fwm [.uref]
If the
urefparameter is not set, the actual battery voltage is used.
The flux weakening engage margin. If the Q-axis motor voltage rises above the value specified by this parameter, the negative D-axis current reference is increased. Similarly, if the Q-axis motor voltage falls below the value specified by this parameter, the negative D-axis current reference is decreased. The algorithm presumes that, by increasing the negative D-axis current, the Q-axis voltage generated by the motor is decreased and vice versa (by the field weakening effect).
fwr [.uref]
If the
urefparameter is not set, the actual battery voltage is used.
The flux weakening release margin. If the Q-axis motor voltage falls below the value specified by this parameter, the D-axis curent reference (related to flux weakening) is reset.
fwr and fwm params operate together in a hysteresis loop. Always have fwr lower than fwm.
If yours motor's back-EMF is not sinusoidal, typically, to improve the behavior, set the fwm lower and increase the diference between the fwr and the fwm.
fwd [-]
The flux weakening integrator gain.
This parameter defines how much (how fast) does the Q-axis voltage change affect the negative D-axis current reference. The higher this parameter is, the faster the response of the field weakening algorithm. The lower this parameter is, the lower risks of oscillations and smoother operation in the field weakining region can be assumed.
If your motor's back-EMF is not perfectly sinusoidal, lower this param.
States (only esc5)
idref_fw [A]
The calculated d-axis field weakening current reference.